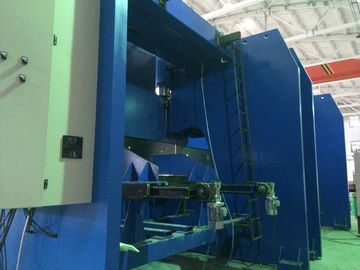
सीएनसी टैंडम हाइड्रोलिक प्रेस ब्रेक
मॉडलः 2-WE67K-1200/7000
अनुप्रयोगः मोनोपोल, ट्रांसमिशन ट्यूबलर टॉवर और उच्च मास्ट बनाने के लिए
| तकनीकी विशेषताएं |
| 1 |
प्रकार |
मल्टी-मशीन टैंडम हाइड्रोलिक सीएनसी इलेक्ट्रो-हाइड्रोलिक सिंक्रो |
| 2 |
कार्यबल |
2X1200 टन |
| 3 |
तालिका की लंबाई |
2X7000 मिमी |
| 4 |
फ्रेम के बीच की दूरी |
5600 मिमी |
| 5 |
गले की गहराई |
1600 मिमी |
| 6 |
खुली ऊँचाई |
1550 मिमी |
| 7 |
स्ट्रोक |
450 मिमी |
|
8
|
काम करना
गति
|
उतारना |
70 मिमी/सेकंड |
| काम करना |
7 मिमी/सेकंड |
| वापसी |
65 मिमी/सेकंड |
| 9 |
मुख्य मोटर |
2x2x45Kw |
| 10 |
सीएनसी प्रणाली |
प्रकार: DELEM DA53T
डेलम कंपनी, नीदरलैंड
2 (Y1,Y2)+टेबल कोहराम प्रणाली
|
| 11 |
औजार |
अगला पृष्ठ देखें
- तालिकाके साथमेकअनिकल मुकुट प्रणाली
|
| 12 |
सिलेंडरों में सील |
SKF प्रकार या NOK प्रकार |
| 13 |
हाइड्रोलिक घटक |
BOSCH-Rexroth, जर्मनी |
| 14 |
हाइड्रोलिक पंप |
सनी (HYTEK)संयुक्त राज्य अमेरिकाचीन में निर्मित ब्रांड |
| 15 |
रैखिक रास्टर डिस्प्लेर सेंसर |
फागर, स्पेन |
| 16 |
कैबिनेट में मुख्य विद्युत तत्व |
श्नाइडर, फ्रांसब्रांड |
| 17 |
वजन |
(२x१४0000 किलो) |
| 18 |
प्रोफाइल आयाम (मिमी) LxWxH |
2-7200x4600x6800
आगे और पीछे की फ़ीडिंग प्रणाली के साथ,
चौड़ाईः 8800
|
| 19 |
पैकिंगः |
परिवहन के दौरान मशीन को अलग करना चाहिए। |
प्रेस ब्रेक टूलींग का विवरण
एक स्थापित उपकरण धारक, मोटाई 40 मिमी उच्च मस्तूल पोल और मोनोपोल के लिए उपयुक्त है

इसमें शामिल हैंःउच्च मास्ट पोल और मोनोपोल के लिए एक स्थापित उपकरण
शामिलः समायोज्य तल मर
| विकल्प1 |
धक्का प्रकार का पोल साइड अनलोडिंग सिस्टम
भारी कार्य प्रकार
|
|
| विकल्प2 |
दूरस्थ निदान कार्य।
टीमशीन आपूर्तिकर्ता ग्राहक को दूरस्थ दोष निदान और दूरस्थ पैरामीटर समायोजन में सहायता कर सकता है। ग्राहकों के लिए उत्पादन को जल्दी से फिर से शुरू करना सुविधाजनक है।
|
|
| विकल्प3 |
मोटर चालित आगे और पीछे की फ़ीडिंग सिस्टम, बड़ी मोटाई के पोल के लिए.कुल8इकाइयों, जिसमें सामने के लिए 4 इकाइयां और पीछे के लिए 4 इकाइयां शामिल हैं।
सभी फीड मोटर्स को इलेक्ट्रिकल कॉन्टैक्टर और पुश बटन से अलग से नियंत्रित किया जाता है, इन सभी की दो गति होती है, तेज और धीमी गति। तेज गति के लिए पुश प्लेट टू टूल फास्ट।झुकने के लिए प्लेट के अंतिम स्थिति के लिए धीमी गति.
ओयूआर डिजाइन श्रृंखला प्रणाली है, लाभ यह है कि यह कभी भी फंस और स्थिर है
|
|
| विकल्प4 |
के लिए स्पेयर पार्ट1200टन प्रेस ब्रेक |
|
मशीन के साथ स्पेयर पार्ट्स
| नहीं. |
भाग |
मात्रा |
| 1 |
M16 नेत्र बंदूक 吊环螺丝 |
2 चित्र |
| 2 |
M30 नेत्र बंदूकसिलेंडर के लिए吊环 |
2 चित्र |
| 3 |
स्थापित करने के लिए बड़ी चेन |
2 चित्र |
| 4 |
हेक्स कुंजीसिलेंडर से रैम कनेक्शन के लिए एक विशेष大T型22内六角?? 手 ((M30), तेल?? 与滑块 कनेक्शन के लिए |
1 चित्र |
| 5 |
55 स्व-निर्मित स्पैनर 外六角 स्व-निर्मित |
1 चित्र |
| 6 |
वसा,黄油 |
1 पैक |
| 7 |
केबल बांधनेवाला 扎带 |
30 चित्र |
| 8 |
24 मिमी हेक्स कुंजी 发黑内六角 拉手 |
1 चित्र |
| 9 |
地脚螺栓ग्राउंड फिक्सिंग बोल्ट |
1 सेट |
Ⅱमुख्य प्रदर्शन:
मशीन का फ्रेम टैंक, वर्कटेबल, बाएं और दाएं आवास और रैम से बना है।
उच्च शक्ति और अच्छी कठोरता है। इसके अलावा यह तनाव को खत्म करने के लिए कंपन लेता है।
2 दोनों मशीनों के समन्वयन कार्य सिद्धांत:विद्युत-हाइड्रोलिक को अपनाना
दोनों मशीनों के समन्वयन को सुनिश्चित करने के लिए आनुपातिक वाल्व। आनुपातिक वाल्व बहुत अच्छा प्रदर्शन जैसे यांत्रिक क्रिया जोड़े के बीच कम घर्षण के साथ बोश कंपनी द्वारा बनाया जाता है,उच्च नियंत्रण बल और निरंतर क्रिया के साथ ठीक इलेक्ट्रॉनिक एम्पलीफायर और विद्युत चुंबक. मशीन के दोनों ओर रैस्टर डिस्प्लेर्स हैं जो रैम की स्थिति का लगातार निरीक्षण करते हैं और नियंत्रण प्रणाली को सिग्नल वापस देते हैं,तो नियंत्रण प्रणाली एक मशीन पर दो सिलेंडर सिंक्रनाइज़ करने के लिए बिजली हाइड्रोलिक वाल्व नियंत्रित करेगाचूंकि रास्टर डिस्प्लेर्स को सीधे आवास प्लेटों पर नहीं, बल्कि ¥C ¥ प्लेटों पर स्थापित किया जाता है, इसलिए काम करते समय राम और फ्रेम का विचलन इसकी माप और नियंत्रण सटीकता को प्रभावित नहीं करेगा।जब दो मशीनें एक साथ काम करती हैं, दो मशीनों के बीच स्थापित अंतर पॉन्टीओमीटर मैकेनिकल सिंक्रनाइज़ेशन सिग्नल को इलेक्ट्रॉनिक में स्थानांतरित करेगा और सिंक्रनाइज़ेशन प्लेट और नियंत्रण प्रणाली को वापस फीड करेगा।सिग्नल को इलेक्ट्रिक-हाइड्रोलिक आनुपातिक वाल्व को नियंत्रित करके दोनों मशीनों के सिंक्रनाइज़ेशन को नियंत्रित करने के लिए बॉश एम्पलीफायर द्वारा बढ़ाया जाएगाइस प्रकार दो मशीनों का समन्वयन उच्च परिशुद्धता के साथ प्राप्त होता है।
3 कंप्यूटर के ज़रिए,ऑपरेटर मशीन के साथ संवाद कर सकता है। कंप्यूटर में कई सेवा भाषाएं हैं, स्वचालित रूप से झुकने के बल की गणना और समायोजित करें। यह मृत बिंदु की गणना और नियंत्रण भी कर सकता है,गति परिवर्तन बिंदु-रम के स्ट्रोक (Y1, Y2) उपयोगकर्ता की विशेष आवश्यकताओं को पूरा करने के लिए एक छोटी झुकाव कर सकते हैं।
4 पूर्ण लंबाई के काम और सनकी काम की आवश्यकताओं को पूरा करने के लिए अच्छी मार्गदर्शन प्रणाली, स्थिति माप प्रणाली और हाइड्रोलिक संतुलन प्रणाली से लैस।
5 काम के समय मशीन के झुकाव की भरपाई करने के लिए वर्कटेबल की क्षतिपूर्ति इकाई को अपनाया जाता है ताकि काम के टुकड़े की सटीकता सुनिश्चित हो सके।
6 सिलेंडर की सतह में अच्छा पहनने और गर्मी उपचार होता है, इसलिए इसमें अच्छा स्नेहन और लंबी सेवा जीवन होता है।

 आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!
आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!